Leetcode - 968:监控二叉树
鉴于你校人均OI背景…本萌新还是需要好好补充算法知识XD
968. 监控二叉树(困难)
给定一个二叉树,我们在树的节点上安装摄像头。
节点上的每个摄影头都可以监视其父对象、自身及其直接子对象。
计算监控树的所有节点所需的最小摄像头数量。
示例 1:
输入:[0,0,null,0,0]
输出:1
解释:如图所示,一台摄像头足以监控所有节点。
示例 2:
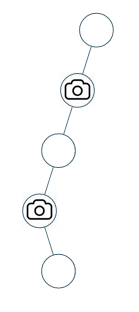
输入:[0,0,null,0,null,0,null,null,0]
输出:2
解释:需要至少两个摄像头来监视树的所有节点。 上图显示了摄像头放置的有效位置之一。提示:
给定树的节点数的范围是 [1, 1000]。
每个节点的值都是 0。来源:力扣(LeetCode)
链接:https://leetcode-cn.com/problems/binary-tree-cameras
著作权归领扣网络所有。商业转载请联系官方授权,非商业转载请注明出处。

仔细想想,对于一个结点是否需要安装摄像头,其实是由其子树的状态来决定的,那么我们可以使用动态规划算法
解法:递归 + 深度优先搜索(DFS) + 动态规划(DP)
大概如下图所示: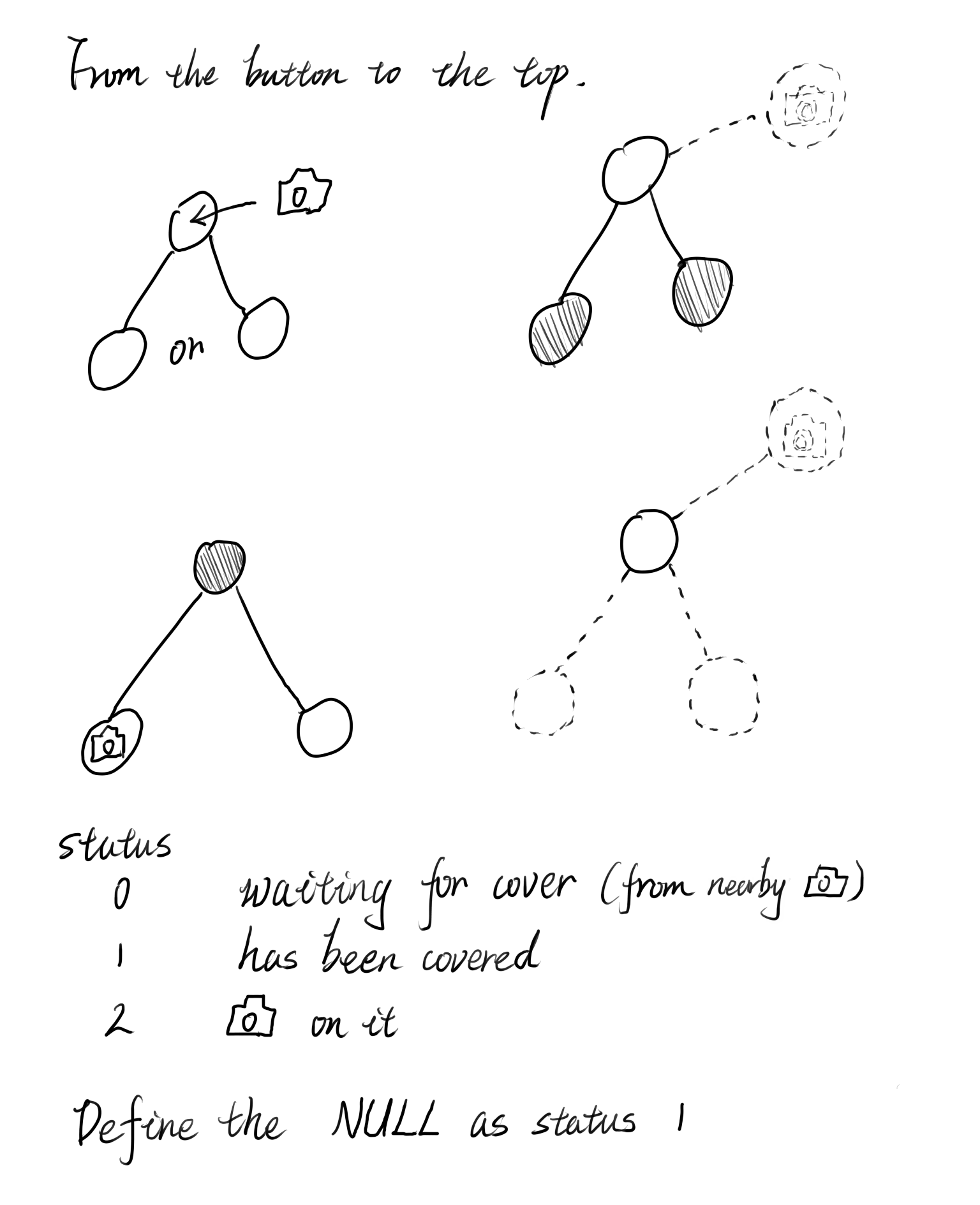
我们考虑有以下几种情况:
- 当一个结点的左或右子树没有被摄像头覆盖上时,这个结点必须要安装一个摄像头来监测其左或右子树,定义为状态码STATUS_CAMERA
- 当一个结点的左右子树都已经被摄像头覆盖上时,为了实现摄像头数量的最小化,需要在该结点的父结点放置摄像头,即在回到父结点前该结点都是未被覆盖的,定义为状态码STATUS_UNCOVERED
- 当一个结点的左右子树中存在摄像头,则该结点肯定是被覆盖了的,定义为状态码STATUS_COVERED
- 对于结点为NULL的情况,我们可以默认他是被覆盖了的结点,即定义为状态码STATUS_COVERED
同时,我们还需要对这棵树的根节点做一次单独的检测,以确定是否要在其上放置摄像头
为了方便判定,我们将STATUS_CAMERA设置为状态码中值相对大的一个
状态转移方程
STATUS_ROOT = F(STATUS_LEFT, STATUS_RIGHT)
时间复杂度:
n次遍历,线性时间复杂度O(N)
空间复杂度:
递归算法要开辟n个栈空间,故为线性空间复杂度O(N)
构造代码如下:
C语言版
1 | /** |

Python语言版:
1 | # Definition for a binary tree node. |

Leetcode - 968:监控二叉树
# Related Post
1.Leetcode - 445:两数相加
2.Leetcode - 685:冗余连接II
3.Leetcode - 685:冗余连接
4.Leetcode - 141:环形链表
1.Leetcode - 445:两数相加
2.Leetcode - 685:冗余连接II
3.Leetcode - 685:冗余连接
4.Leetcode - 141:环形链表

